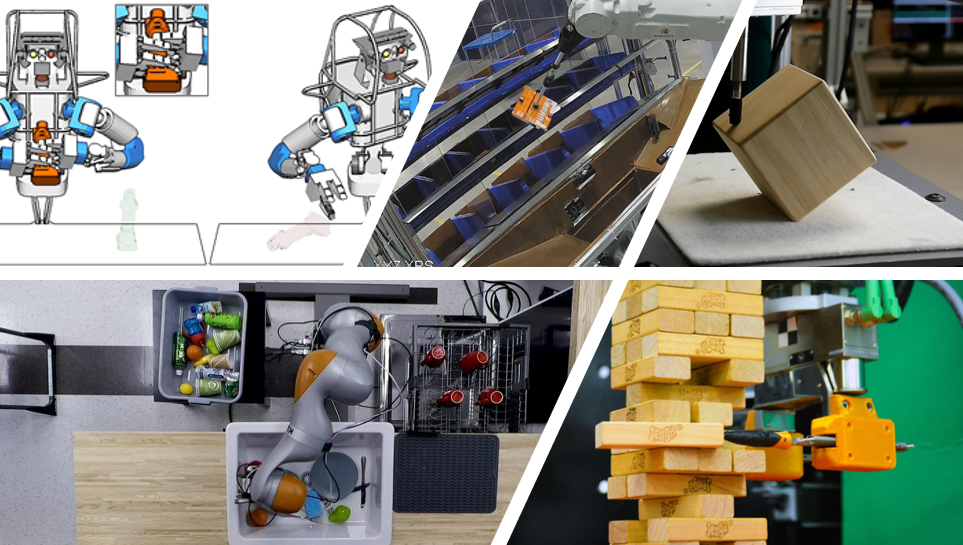
We are seeing a growing need of dexterity in robotic manipulation beyond grasping. Such dexterity is usually motivated by a creative use of contacts, where these contacts can come from robot hands, arms, or any objects and fixtures in the environment. An intelligent robot can manipulate an object or its own body by exploiting the geometric and force constraints offered through contacts. Such skillful use of contact interactions could be crucial for realizing dexterous, reactive and robust robotic manipulation as well as mobile legged locomotion (self-manipulation).
While highly desired, such contact-rich manipulation comes with its own challenges – from noisy sensors to computationally demanding planning and control frameworks. While the recent research has proposed efficient algorithms and solutions for dexterous and robust manipulation, the industrial applications are seldom seen. This workshop aims to address and hopefully bridge this gap by inviting leading researchers from academia to discuss the recent advances in the field and industry experts to share their experiences and needs from the contact-rich robotic manipulation in industry. We hope this workshop can encourage discussions about possible transfers between the academic results and industrial applications.
When and where
- Nov. 8th, 9am ~ 5:30pm
- Room: LG-R20
Topics of interest
- Non-prehensile Manipulation
- Manipulation through External Contacts
- In-hand Manipulation
- Multi-modal Manipulation Planning
- Grasp planning, Motion planning, and Task Planning for Manipulators
- Model/Policy Learning for Manipulation through Contacts
- Whole-body Manipulation
- Locomotion/Self-manipulation considering Contacts and Gravitational Constraints
Open Talk Session
The workshop has several open talk sessions. The application is open to both academia and industry. Everyone can apply for a talk to share their work on related fields. The talk should be around 5 min plus Q&A.
How to apply
Please send an email to manipulation.workshop@gmail.com with title Application for open talk. Please include the following information in your email:
- Title and abstract of your talk;
- Brief self-introduction. (< 100 words)
Please apply early, as the positions are limited.
Important dates
First round of applications ends at October 6th.
For the remaining slots, we will assign them in a first-come, first serve manner. Applications will receive the decisions within five days. All applications must be received before October 25th.
(Oct.12) The open talk slots are full. The application is now closed.Invited Speakers
(All in alphabetical order)
Reeve Zheng Hao Chong, Nanyang Technological University, website
Kensuke Harada, Osaka University, website
Maximo Roa, DLR German Aerospace Center, website
Alberto Rodriguez, Massachusetts Institute of Technology, website
Miao Li, Wuhan University/Cobot Technology Co., website
Huan Liu, MUJIN Inc., website
Tao Wang, Dorabot Inc., website
Peter Kuan-Ting Yu, XYZ Robotics Inc., website
Ruobing Yu, AI Data Innovations, website
Neel Doshi, MCube Lab, MIT
Felix von Drigalski, OMRON SINIC X Corporation
Werner Friedl, German Aerospace Center Institute for Robotics and Mechatronics
Mincheul Kang, KAIST at Daejeon, Korea
Jelizaveta Konstantinova, Ocado Technology
Andrew Melnik, CITEC, Bielefeld University
Fan Shi, JSK Lab, the Univ. of Tokyo
Maria Bauza Villalonga, MCube Lab, MIT
Program (Tentative)
(Mouse over the title to see abstracts.)
| Time | Speaker | Details |
|---|---|---|
| 9:00-9:15 | Opening | |
| 9:15-9:45 | Alberto Rodriguez, MIT, USA | Certified Grasping |
| 9:45-10:05 | Peter Yu, XYZ Robotics Inc., USA | Vision and Tooling for Robotic Manipulation |
| 10:05-10:25 | Ruobing Yu, AI Data Innovations, USA | “Decade” Problem for bridging academia to industry |
| 10:25-10:45 | Open Talk Session I | Neel Doshi, Hybrid Differential Dynamic Programming for Planar Manipulation Primitives Felix von Drigalski, In-hand pose estimation using active touch |
| 10:45-11:15 | Coffee break | |
| 11:15-11:45 | Kensuke Harada, Osaka Univ., JAPAN | Industrial Automation by Parts Picking and Product Assembly |
| 11:45-12:15 | Zheng Hao (Reeve) Chong, NTU, SINGAPORE | Competition as Innovation Shortcut in Robotics Solutions |
| 12:15-12:35 | Tao Wang, Dorabot Inc., CHINA | Stable grasping in the field of logistics |
| 12:35-13:05 | Open Talk Session II | Jelizaveta Konstantinova, SoMa - Soft Manipulation, commercial food handling Fan Shi, Steps Towards Aerial Dexterous Manipulation Mincheul Kang, Collision-Free Trajectory Optimization of Redundant Manipulator given an End-Effector Path |
| 13:05-14:05 | Lunch break | |
| 14:05-14:35 | Maximo Roa, DLR, GERMANY | Robustness and performance of CLASH, a compliant sensorized hand with variable stiffness |
| 14:35-14:55 | Miao Li, Cobot Inc., CHINA | TBD |
| 14:55-15:15 | Huan Liu, Mujin Inc., JAPAN | Never give up, never surrender! What it takes to deploy the latest and greatest robotics technologies in production |
| 15:15-15:45 | Open Talk Session III | Maria Bauza Villalonga, Precise Tactile Localization for object manipulation Andrew Melnik, Tactile Sensing and Deep Reinforcement Learning for In-Hand Manipulation Tasks Werner Friedl, Grasp pose adaption by tactile and proximity input for a soft hand to improve grasping in crowded scenes |
| 15:45-16:15 | Coffee break | |
| 16:15-17:15 | Discussion | |
| 17:15 | End |
Organizers
Main Organizer
- Yifan Hou, Ph.D. Student, Carnegie Mellon University, yifanh@cmu.edu
- Weiwei Wan, Assoc. Professor, Osaka University, wan@sys.es.osaka-u.ac.jp
- Mehmet Dogar, Ass. Professor, University of Leeds, m.r.dogar@leeds.ac.uk
- Jurgen Leitner, Postdoc, Queensland University of Technology, j.leitner@qut.edu.au
Co-organizers
- Nikhil Chavan Dafle, Ph.D. Candidate, MIT, nikhilcd@mit.edu
- François Hogan, Ph.D. Candidate, MIT, fhogan@mit.edu

Photos
